HOME 2026-04-15(パノラマあり) 展示会を インターネットにつなぐ 最先端のイノベーションが集う展示会。インターネット展示会.tvは、世界各地の展示会を、まるで来場したかのように動画で体験できるユニークなプラットフォームです。出展をその場限りで終わらせない、次世代の「コネクテッド」な展示会会場へ、ようこそ! これから開催される世界の展示会を検索 出展を予定していますか?展示会の動画化サービスはこちら 第13回インドトレンドフェア東京2024 (秋・冬) [第13回インドトレンドフェア東京2024 (秋・冬)] Kantha Pants - PACIFIC DESIGN HOUSE 第29回 FaW TOKYO (ファッション ワールド 東京)春 2026 カスタムプリントソックス - ウォルトテクノロジージャパン株式会社 [第29回 FaW TOKYO (ファッション ワールド 東京)春 2026] India International Trade Fair (IITF) 2024 [India International Trade Fair (IITF) 2024] Bamboo Products - MANU FACTORY cite_2019-出展者 [CITE JAPAN 2019] ウォーターコート「ナノファイバージェル(R)」(日本語字幕付き) JPCA Show 2013 [JPCA Show 2013] はんだパレット秒速洗浄装置 「FLUX BUSTER」 - シイエムケイメカニクス株式会社 Anuga FoodTec 2022 [Anuga FoodTec 2022] Cheese Cutting Machine - Facchinetti IETF 2025 - International Engineering & Technology Fair [IETF 2025 - International Engineering & Technology Fair] Metal, Magnets & Electronic Parts - TOYO SUCCESS 東京ケアウィーク’24 [東京ケアウィーク’24] まもるーの「見守り介護ロボット」 - 株式会社ZIPCARE JFW インターナショナル・ファッション・フェア 2013 [JFW-IFF 2013] リボン勲章 ROSETTE - 株式会社トリート CES® 2024 [CES® 2024] DASSAULT SYSTEMS AMERICAS CORP 最新の技術とユニークな製品を持つ世界中の出展者を見つけよう Search 農林水産・食品 医療・健康 趣味・教育 基礎産業 輸送・物流・包装 建築 情報・通信 生活 機械・工業技術 環境 環境 サービス その他 nano tech 2024 第23回 国際ナノテクノロジー総合展・技術会議 「nano tech 2024 第23回 国際ナノテクノロジー総合展・技術会議」は世界最大級のナノテクノロジー総合展示会。環境・エネルギー、次世代電池、自動車、ポスト6G、バイオテクノロジー、IT&エレクロニクスなど様々な分野への応用が出来るナノテクノロジー技術のビジネスマッチングを目的としている。同時開催(構成展)は「TCT Japan 2024 -3Dプリンティング & AM技術の総合展-」「ASTEC2024 第19回先端表面技術展・会議展」「SURTECH2024 表面技術要素展」「MEMSセンシング&ネットワークシステム展 2024」「CONVERTECH2024」「新機能性材料展2024」「GREEN MATERIAL2024」「3DECOtech 2024」「WELL-BEING TECHNOLOGY 2024」「ENEX2024 第48回地球環境とエネルギーの調和展」「DER/Microgrid Japan2024」「第18回再生可能エネルギー世界展示会&フォーラム」「Offshore Tech Japan 2024 第5回海洋産業技術展」「InterAqua 2024 第15回水ソリューション総合展」。 NEW! 新着の出展製品 15th Edition of India Warehousing Show 2026 Supra Wheels & Castors - SPECIALITY URETHANES [15th Edition of India Warehousing Show 2026] 15th Edition of India Warehousing Show 2026 AIDC Products - CHAINWAY INDIA [15th Edition of India Warehousing Show 2026] 15th Edition of India Warehousing Show 2026 Complete Storage Solutions - GIRAFFE | DEWAS STORAGE SOLUTIONS [15th Edition of India Warehousing Show 2026] 15th Edition of India Warehousing Show 2026 AIDC & POS Solutions - RETSOL [15th Edition of India Warehousing Show 2026] 15th Edition of India Warehousing Show 2026 Customized Bearing Solutions - BEARING MANUFACTURING COMPANY [15th Edition of India Warehousing Show 2026] 15th Edition of India Warehousing Show 2026 Roofing Products - POWER CHEM PLAST [15th Edition of India Warehousing Show 2026] 15th Edition of India Warehousing Show 2026 Supply Chain Solutions - INVENTRAX [15th Edition of India Warehousing Show 2026] 15th Edition of India Warehousing Show 2026 Autonomous Mobile Robots (AMR) - NEXSTRIDE ROBOTICS [15th Edition of India Warehousing Show 2026] 15th Edition of India Warehousing Show 2026 Dehumidifiers - BRY-AIR [15th Edition of India Warehousing Show 2026] NEW! 新着の展示会 10 VideosPlay All 15th Edition of India Warehousing Show 2026 (インド) 2026/07/15 10 VideosPlay All SPORTEC 2026 2026/07/09 2026/07/09 8 VideosPlay All GFT 2026 (タイ) 2026/07/08 10 VideosPlay All ILA Berlin 2026 (ドイツ) 2026/07/06 10 VideosPlay All 第38回 ものづくり ワールド [東京] 2026 2026/07/02 2026/07/02 8 VideosPlay All Manufacturing Expo 2026 (タイ) 2026/07/01 11 VideosPlay All 第29回 ライフスタイル Week 【夏】 2026 2026/06/25 2026/07/01 4 VideosPlay All 台北國際食品展 FOOD TAIPEI MEGA SHOWS 2026 (台湾) 2026/06/25 10 VideosPlay All Biofuel Expo 2026 (インド) 2026/06/19 11 VideosPlay All 第8回 国際 建設・測量展(CSPI2026) 2026/06/18 2026/06/18 1 VideoPlay All ROBOT TECHNOLOGY JAPAN 2026 2026/06/15 2026/06/15 9 VideosPlay All Interop Tokyo 2026 2026/06/12 2026/06/15 農林水産・食品分野 医療・健康分野 趣味・教育分野 基礎産業分野 輸送・物流・包装分野 輸送・物流・包装分野 建築分野 情報・通信分野 生活分野 機械・工業技術分野 環境分野 総合分野 サービス分野 展示会一覧検索ページ Our Service インターネット展示会.tv 掲載サービス 展示会出展の「出会いの機会」を地球規模に拡大。出展を世界に配信しよう。98,000円から 展示会動画とは? コラボ出展 小さな展示台で、みんなで出展しませんか?出展費25万円から 「コラボ出展」とは? これから開催される展示会 全世界でこれから開催される展示会情報を集めました。掲載情報と異なる場合がありますので、詳細および最新の情報は主催者ホームページをご確認ください。 これから開催される世界の展示会を検索(展示会ナビへ) 東京ビッグサイト 展示会スケジュール 幕張メッセ 展示会スケジュール パシフィコ横浜 展示会スケジュール インテックス大阪 展示会スケジュール 全世界 展示会スケジュール 展示会ウオッチ 展示会の最新動向をチェック! CEIワールドエキスポ(インド・ニューデリー開催予定)、「地政学状況の変化」により開催延期が発表 インド・ニューデリーの国際見本市会場プラガティ・マイダンで2... JETRO「J-messe」終了 ― 展示会情報サービスの25年に幕 こんにちは。展示会ウオッチャーの酒井です。J-messeのサ... 説明が長いブースほど、成果が出ない──展示会で「正しい問い」を持つということ “The most important thing in c... ドバイ国際製薬・医薬技術展(DUPHAT 2026)が開催延期を発表:新日程は6月に ドバイ・ワールド・トレード・センター(DWTC)で3月24日... 展示会に革新は必要か?──ドラッカーが語る「イノベーション」の本当の意味 “Innovation is change that cre... 全部伝えようとした瞬間、何も残らない──展示会で「強み」に集中するという決断 “Build on strengths.”――ピーター・F・... 売ろうとした瞬間、展示会は終わる──ドラッカーが教える「売らずに売る」出展術 “The aim of marketing is to ma... 完璧な計画は、初日の夕方に崩れる──展示会で成果を生む「フィードバック思考」 “Plans are only good intention... Load More 展示会ナビへ CBA Expo 2026・Concrete Expo Asia出展者・来場者募集中 会場:タイ国バンコク BITEC会期: 2026年9月23日から25日CBA Expo 2025は、建設機械、鉱山機械、工具・設備、建築技術など、Concrete Expo Asia 2025は、コンクリートや建設分野などが対象。ウェブサイト:https://cba-expo.com/, https://concrete-expoasia.com/ お問い合わせ 産業別展示会動画 農林水産・食品分野 FRUIT LOGISTICA 2024 [FRUIT LOGISTICA 2024] Urban Harvest [Plant Based World Expo 2022] Sons of Butchers - Vegan Meat Substitutes トラックQQサービス - 株式会社タカネットサービス [FOOD展 2025] [London Wine Fair 2022] ベルマーPODBAR+(プラス) 00:55 [Food Week Korea 2016] 保冷材「キャッチクール」 - 株式会社トライ・カンパニー コリア [JAPAN DIY HOMECENTER SHOW 2012]ラチェットパイプカッタ - 京都機械工具株式会社 [第57回スーパーマーケット・トレードショー2023] ホワイトハム - 日進畜産工業株式会社 農林水産・食品分野の製品/サービスを表示 医療・健康分野 第25回 インターフェックス Week 東京 [第25回 インターフェックス Week 東京] ラボ支援システム - ダイトロン株式会社 [MEDICA 2023] KYOTO KAGAKU 01:27 [CEATEC 2022] ワールド コネクティビティ - TE Connectivity NEXT POP-UP STORE DESIGN - Next Pop-up Store Design Project Team [日経メッセ 街づくり・店づくり総合展 2026] [フランチャイズ・ショー 2024] コンビニフィットネス🄬 - 株式会社プロフィットジャパン [第96回 東京インターナショナル・ギフト・ショー 秋2023] 韓国風デザイン スマホショルダーケース - リスカイ株式会社 02:43 [CEATEC 2022] ATEM Mini Extreme ISO - ブラックマジックデザイン株式会社 医療・健康分野の製品/サービスを表示 趣味・教育分野 01:26 London Stationery Show 2022 [London Stationery Show 2022] Pencil Me In [教育ITソリューションEXPO 2015] Eラーンニング学習管理システム「iTutor LS」 - 株式会社ミライカ 02:52 [HCJ 2018] ホテルトータルシステム「Dynalution」 - ダイナテック株式会社 [産業交流展2010] 学校向け教育クラウド ねっこみゅ - 株式会社日本ネットシステム [第41回 東京モーターサイクルショー] 次世代のカーナビディスプレイ「ウェアラブルディスプレイ」 - 株式会社ユピテル [レジャー&アウトドアジャパン2024] 小ロットオリジナル商品 - 株式会社ハッピーカンパニー [SEOUL INTERNATIONAL STATIONERY & OFFICE FAIR 2022] ジャルザリオテープカッター - ギフンポリテック 趣味・教育分野の製品/サービスを表示 基礎産業分野 第16回 COSME Week 東京 2026 ヘアケアブラシ - KELLER BURSTEN [第16回 COSME Week 東京 2026] [IPF Japan 2023 - 国際プラスチックフェア] エコナフォーム - 三和化工株式会社 [エコプロダクツ 2014] 植物原料プラスチック使用の環境樹脂「UNI-PELE」 - 株式会社ユニオン産業 00:41 [InfoComm 2022] 360 camera COOLPO - Shanghai LiwCV CO., Ltd. [DMEA 2023] App for panic disorder - Mindable Health 02:08 [第24回 ファインテック ジャパン] 粘着剤廃液リサイクル装置「CLEAN-ACE-101」 - コーベックス株式会社 [IMTOS 2023 - India Machine Tools Show ] 公害防止機器 - ダイナバック・インディア 基礎産業分野の製品/サービスを表示 輸送・物流・包装分野 00:58 smts_2016-出展者 [第50回 スーパーマーケット・トレードショー 2016] チアシード蒟蒻ゼリー - 株式会社若翔 [国際物流総合展2012]燃料電池式アルコールチェッカー - 株式会社タニタ 01:45 [FoodWeekKorea 2018] 甘酸っぱい酵素炭酸飲料水「Berrykle」 - Natureganic Seowon Corporation [IMTOS 2023 - India Machine Tools Show] 溶接、切断および安全製品 - アルファENGG。サービス 本革ベルト・小物製造 - 株式会社エヌ・エックス [第29回 ライフスタイル Week 【夏】 2026] [日経メッセ 街づくり・店づくり総合展 2025] 匠の誠品 - 東昇株式会社 [第36回 ものづくり ワールド [東京] 2024] 精密ロックナット - 深研精密株式会社 輸送・物流・包装分野展示会の製品/サービスを表示 建築分野 2013NEW環境展 [2013NEW環境展] 粗破砕・細破砕一体型破砕機 「DZ750E」 - 株式会社サナース [FOOD STYLE Japan 2023] グンマー麺ツケル - クリタ食品株式会社 [下水道展’24東京] Wilo-EMUport CORE - WILO Pumps Ltd. [朝日住まいづくりフェア2012] 柔らかい浴槽 ソフトバス - 株式会社三心 [JAPAN DIY HOMECENTER SHOW 2013]野菜を育むインテリア 「灯菜 Akarina」 - オリンピア照明株式会社 [外食ビジネスウィーク 2015] 桃と完熟南高梅の梅酒「桃姫」 - 中田食品株式会社 [第27回 R&R 建築再生展 2023] SKグラウトプラグA工法 - シーカ・ジャパン株式会社 建築分野の製品/サービスを表示 情報・通信分野 DMEA 2025 - Connecting Digital Health [DMEA 2025 - Connecting Digital Health] Catchup Applications - Hospital App with Navigation Scented Denim Collection by GMS - GMS Textiles [GFT 2026] [第21回 総務・人事・経理 Week【春】] 障がい者雇用サポートサービス「ALPHA SMILE」 - 株式会社アルファプランニング [第28回 インターフェックス ジャパン] 充填ノズル液ダレ防止具「シャット弁」 - 株式会社ナオミ [ILA Berlin 2024] Spacefood - Plant Based Foods for Space Missions [第55回 管工機材・設備総合展] 現場Hub - 株式会社ARTISAN [イベントJAPAN 2013] 大型LEDビジョントラック - 株式会社アップスター 情報・通信分野の製品/サービスを表示 生活分野 Maison&Objet Paris 2024 [Maison&Objet Paris 2024] hellomaco [JGAS2013] EXPAND YOUR SUCCESS - 富士フイルムグローバルグラフィックシステムズ株式会社 01:22 [危機管理産業展(RISCON TOKYO)2022] 狭小空間点検ドローン「ELIOS 2」 - 株式会社ニシヤマ [第15回インドトレンドフェア東京2025 (秋・冬)] Home Textiles - ECOTASAR [Design London 2022] Bright Green - Artificial Planting 01:53 [JAPANTEX 2015] filc Natural & Craft ショップ / Amli(アームリ) - フジライトカーペット株式会社 [イベントJAPAN2013] ジップライン・ブレイブジャンプ - 日建リース工業株式会社 生活分野の製品/サービスを表示 機械・工業技術分野 5th Expo Paint & Coatings 2024 [5th Expo Paint & Coatings 2024] Mica Effect Pigment - EMS Radio over IP (RoIP) for UAVs and airports - FJORD7 [ILA Berlin 2026] [NHS 2024] AUTOMOTIVE JACKS - RUBICON INDUSTRIAL [JASIS 2023] データマネジメントサービスMIQAN - 株式会社QunaSys [NIKKEI MESSE] 電動式階段運搬車「電ネコ」 - サンタックス株式会社 [TOKYO PACK 2010] 帯び掛けラベリングシステム - イーデーエム株式会社 [MF-Tokyo 2013] 非軸対称成形機 「リニアモータ駆動スピニングマシン」 - 株式会社大東スピニング 機械・工業技術分野の製品/サービスを表示 環境分野 01:20 semicon_2015-出展者 [SEMICON Japan 2015] 非磁性ステンレス鋼製「リニアローラウェイスーパーX」 - 日本トムソン株式会社 [第48回スーパーマーケット・トレードショー2014] 人・植物・環境にやさしい用土「チャコボール」 - インパック株式会社 [JIMTOF 2024 JAPAN INTERNATIONAL MACHINE TOOL FAIR (第32回日本国際工作機械見本市)] ギヤエース クロス - ノリタケ株式会社 [FOODEX JAPAN 2024 - 第49回 国際食品・飲料展] プロポリス - CONAP-JP株式会社 [TOKYO PACK 2010] 帯び掛けラベリングシステム - イーデーエム株式会社 [ACREX INDIA 2024] HVAC Tools - WIPCOOL [第6回 建設・測量生産性向上展 (CSPI-EXPO 2024)] DiveUnit300(産業用水中ドローン) - 株式会社FullDepth 環境分野の製品/サービスを表示 サービス分野 Fooma Japan 2026 スパイラルフリーザー「SPIN SHOCK®」 - タカハシガリレイ株式会社 [Fooma Japan 2026] [第57回スーパーマーケット・トレードショー2023] くまさんもなか - 株式会社栗庵風味堂 [Eight EXPO 第3回 営業マーケDX 比較・導入展 2024] アカウントインテリジェンスツール「ウルテク」 - ログリー株式会社 01:02 [国際物流総合展 2016] 3軸起震実験受託 - 株式会社ワコーパレット [第57回スーパーマーケット・トレードショー2023] コリコレシリーズ スンドゥブチゲ - 株式会社農心ジャパン [第35回 日本 ものづくり ワールド] FAXバスターズ - 株式会社batton [Food + Beverage Indonesia 2024] Digital Printing - Inno Lite サービス分野の製品/サービスを表示 その他の分野 World Food India 2024 [World Food India 2024] Seed, Food & Beverages - ASUKU INDIA [Taipei International Bakery Show 2024] Flour - Hong Ming Enterprise Co , LTD [ROBOTX @ METALEX 2024] Victor Injection molding machine - Victor Thailand [5th Expo Paint & Coatings 2024] Antimicrobial Technologies - POLYAMYNA [HYPER JAPAN Festival 2023] キャラクターコミック - Naru Naru 01:16 [第6回 イベント総合EXPO] アクションスポーツ動画制作サービス - フュールメディア株式会社 [TAIPEI CYCLE 2023] 自転車プロフェッショナルアクセサリー - KMC その他の分野の製品/サービスを表示 サービス紹介 展示会は日本全国、そして世界へつながる扉です。 展示会ドリブンのリアル+オンライン マーケティングを提唱しています。 展示会ナビ 展示会を探す・ノウハウ・成功事例の総合ガイド https://navi.tenji.tv/ 展示会動画配信サービス インターネットと翻訳を使って、出展を全世界に配信しよう。98,000円から https://navi.tenji.tv/tenjikai-movie-2023/ 展示会コラボ出展 小さな展示台で、みんなで出展しませんか?出展費25万円から https://navi.tenji.tv/collabo/
第29回 FaW TOKYO (ファッション ワールド 東京)春 2026 カスタムプリントソックス - ウォルトテクノロジージャパン株式会社 [第29回 FaW TOKYO (ファッション ワールド 東京)春 2026]
India International Trade Fair (IITF) 2024 [India International Trade Fair (IITF) 2024] Bamboo Products - MANU FACTORY
IETF 2025 - International Engineering & Technology Fair [IETF 2025 - International Engineering & Technology Fair] Metal, Magnets & Electronic Parts - TOYO SUCCESS
15th Edition of India Warehousing Show 2026 Supra Wheels & Castors - SPECIALITY URETHANES [15th Edition of India Warehousing Show 2026]
15th Edition of India Warehousing Show 2026 AIDC Products - CHAINWAY INDIA [15th Edition of India Warehousing Show 2026]
15th Edition of India Warehousing Show 2026 Complete Storage Solutions - GIRAFFE | DEWAS STORAGE SOLUTIONS [15th Edition of India Warehousing Show 2026]
15th Edition of India Warehousing Show 2026 AIDC & POS Solutions - RETSOL [15th Edition of India Warehousing Show 2026]
15th Edition of India Warehousing Show 2026 Customized Bearing Solutions - BEARING MANUFACTURING COMPANY [15th Edition of India Warehousing Show 2026]
15th Edition of India Warehousing Show 2026 Roofing Products - POWER CHEM PLAST [15th Edition of India Warehousing Show 2026]
15th Edition of India Warehousing Show 2026 Supply Chain Solutions - INVENTRAX [15th Edition of India Warehousing Show 2026]
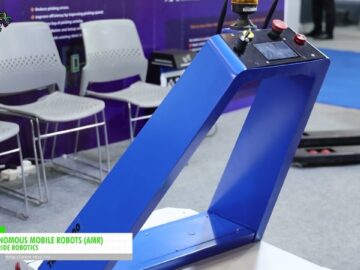
15th Edition of India Warehousing Show 2026 Autonomous Mobile Robots (AMR) - NEXSTRIDE ROBOTICS [15th Edition of India Warehousing Show 2026]
15th Edition of India Warehousing Show 2026 Dehumidifiers - BRY-AIR [15th Edition of India Warehousing Show 2026]
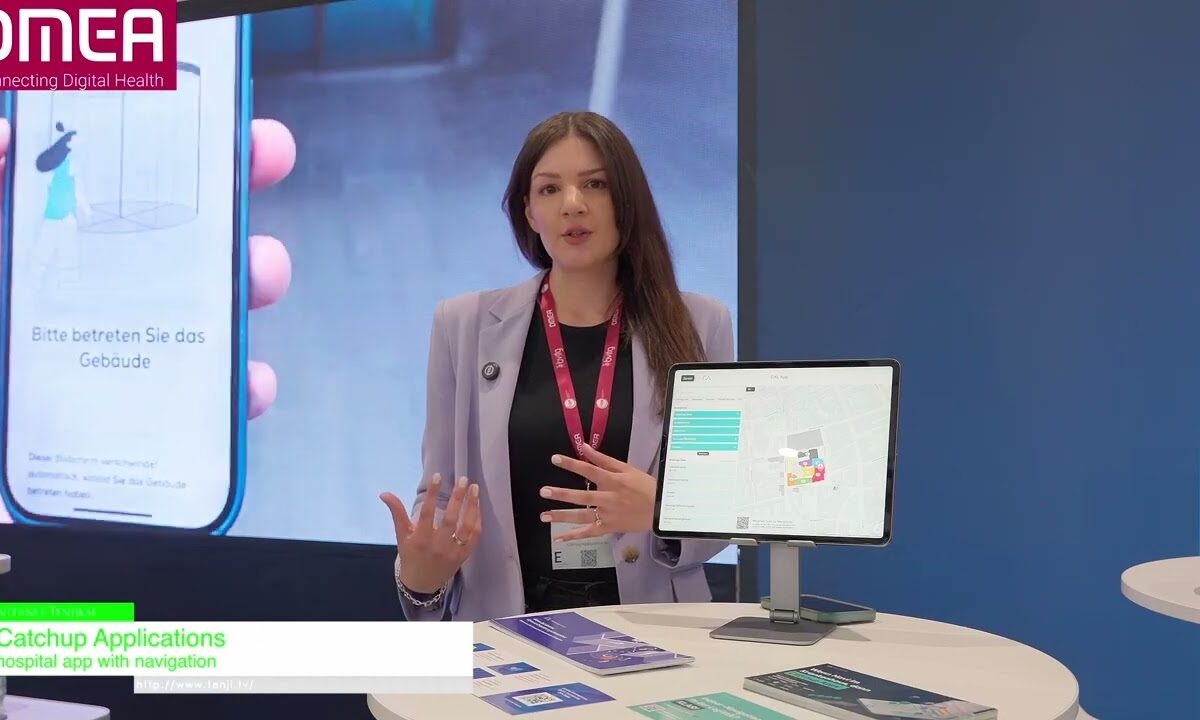
DMEA 2025 - Connecting Digital Health [DMEA 2025 - Connecting Digital Health] Catchup Applications - Hospital App with Navigation


























![[Food Week Korea 2016] 保冷材「キャッチクール」 – 株式会社トライ・カンパニー コリア](https://www.tenji.tv/wp-content/uploads/2016/11/food-week-korea-20163-100x100.jpg)



![[CEATEC 2022] ワールド コネクティビティ - TE Connectivity](https://www.tenji.tv/wp-content/uploads/2022/10/ceatec-2022-te-connectivity-100x100.jpg)



![[CEATEC 2022] ATEM Mini Extreme ISO - ブラックマジックデザイン株式会社](https://www.tenji.tv/wp-content/uploads/2022/10/ceatec-2022-atem-mini-extreme-is-100x100.jpg)
![[教育ITソリューションEXPO 2015] Eラーンニング学習管理システム「iTutor LS」 – 株式会社ミライカ](https://www.tenji.tv/wp-content/uploads/2015/05/itexpo-2015-e.jpg)
![[HCJ 2018] ホテルトータルシステム「Dynalution」 – ダイナテック株式会社](https://www.tenji.tv/wp-content/uploads/2018/03/hcj-2018-dynalution-100x100.jpg)
![[産業交流展2010] 学校向け教育クラウド ねっこみゅ - 日本ネットシステム](https://www.tenji.tv/wp-content/uploads/2013/01/06.jpg)
![[第41回 東京モーターサイクルショー] 次世代のカーナビディスプレイ「ウェアラブルディスプレイ」 – 株式会社ユピテル](https://www.tenji.tv/wp-content/uploads/2014/03/136505.jpg)




![[エコプロダクツ 2014] 植物原料プラスチック使用の環境樹脂「UNI-PELE」 – 株式会社ユニオン産業](https://www.tenji.tv/wp-content/uploads/2014/12/20141.jpg)


![[第24回 ファインテック ジャパン] 粘着剤廃液リサイクル装置「CLEAN-ACE-101」 – コーベックス株式会社](https://www.tenji.tv/wp-content/uploads/2014/04/141091.jpg)

![[第50回 スーパーマーケット・トレードショー 2016] チアシード蒟蒻ゼリー – 株式会社若翔](https://www.tenji.tv/wp-content/uploads/2016/02/50-20162.jpg)

![[FoodWeekKorea 2018] 甘酸っぱい酵素炭酸飲料水「Berrykle」 – Natureganic Seowon Corporation](https://www.tenji.tv/wp-content/uploads/2018/12/foodweekkorea-2018-berrykle-natu-100x100.jpg)




![[2013NEW環境展] 粗破砕・細破砕一体型破砕機 「DZ750E」 – 株式会社サナース](https://www.tenji.tv/wp-content/uploads/2013/05/010.jpg)


![[朝日住まいづくりフェア2012] 柔らかい浴槽 ソフトバス – 株式会社三心](https://www.tenji.tv/wp-content/uploads/2012/11/026.jpg)
![[JAPAN DIY HOMECENTER SHOW 2013]野菜を育むインテリア 「灯菜 Akarina」 – オリンピア照明株式会社](https://www.tenji.tv/wp-content/uploads/2013/08/10375.jpg)
![[外食ビジネスウィーク 2015] 桃と完熟南高梅の梅酒「桃姫」 – 中田食品株式会社](https://www.tenji.tv/wp-content/uploads/2015/09/20152.jpg)



![[第28回 インターフェックス ジャパン] 充填ノズル液ダレ防止「シャット弁」 – 株式会社ナオミ](https://www.tenji.tv/wp-content/uploads/2015/07/28.jpg)


![[イベントジャパン 2013] 大型LEDビジョントラック – 株式会社アップスター](https://www.tenji.tv/wp-content/uploads/2013/01/0134.jpg)

![[JGAS2013] EXPAND YOUR SUCCESS – 富士フイルムグローバルグラフィックシステムズ株式会社](https://www.tenji.tv/wp-content/uploads/2013/10/11561.jpg)
![[危機管理産業展(RISCON TOKYO)2022] 狭小空間点検ドローン「ELIOS 2」 - 株式会社ニシヤマ](https://www.tenji.tv/wp-content/uploads/2022/10/riscon-tokyo2022-elios-2-100x100.jpg)


![[JAPANTEX 2015] filc Natural & Craft ショップ / Amli(アームリ) – フジライトカーペット株式会社](https://www.tenji.tv/wp-content/uploads/2018/12/japantex-2015-filc-natural-craft-100x100.jpg)
![[イベントJAPAN2013] ジップライン・ブレイブジャンプ – 日建リース工業株式会社](https://www.tenji.tv/wp-content/uploads/2013/01/0136.jpg)



![[NIKKEI MESSE] 電動式階段運搬車「電ネコ」 – サンタックス株式会社](https://www.tenji.tv/wp-content/uploads/2014/03/13183.jpg)
![[TOKYO PACK 2010] 帯び掛けラベリングシステム – イーデーエム](https://www.tenji.tv/wp-content/uploads/2013/01/021.jpg)
![[MF-Tokyo 2013] 非軸対称成形機 「リニアモータ駆動スピニングマシン」 – 株式会社大東スピニング](https://www.tenji.tv/wp-content/uploads/2013/07/9518.jpg)
![[SEMICON Japan 2015] 非磁性ステンレス鋼製「リニアローラウェイスーパーX」 – 日本トムソン株式会社](https://www.tenji.tv/wp-content/uploads/2015/12/semicon-japan-2015.jpg)
![[第48回スーパーマーケット・トレードショー2014] 人・植物・環境にやさしい用土「チャコボール」 – インパック株式会社](https://www.tenji.tv/wp-content/uploads/2014/02/12835.jpg)






![[国際物流総合展 2016] 3軸起震実験受託 – 株式会社ワコーパレット](https://www.tenji.tv/wp-content/uploads/2016/09/2016-3-100x100.jpg)







![[第6回 イベント総合EXPO] アクションスポーツ動画制作サービス – フュールメディア株式会社](https://www.tenji.tv/wp-content/uploads/2019/03/6-expo-100x100.jpg)




